Framkallning med FotoV
FotoV är ett verktyg jag utvecklar som konverterar RAW-filer till färdiga foton och som jag redan använder till alla mina bilder.
Varför just FotoV?
Det övergripande målet är att skapa ett verktyg som jag själv och andra som tycker om naturliga bilder kan använda som ett alternativ till vanlig mjukvara som Lightroom, Darktable eller Affinity. Ett sätt att göra det mesta av den fångade sensordatan utan att vara beroende av vad någon enskild tycker ~ser rätt ut~, utan att låta verktyget göra den bedömningen och låta det vara en grogrund för att prata om och granska hur vi vill att bilder blir till.
De konventionella verktygen bygger ofta på kompromisser som är väldigt förståeliga historiskt och praktiskt. Några av de klurigare frågorna gäller pålitlig automatisk vitbalans, tonkurvan och färgprofilen. Vid något tillfälle vill jag förklara mer om de sakerna på den här sidan men nu tänkte jag fokusera på det jag tycker är klurigast, nämligen 'demosaicing' och vad FotoV försöker göra annorlunda med det.
Demosaicing och CFD
Ovanpå i stort sett alla färgkamerasensorer ligger som ett schackrutemönstrat hölje som är till för att blockera ljus som inte är av rätt slag för just den pixeln av sensorn. Det vanligaste är ett Bayer-filter med en röd, två gröna och en blå pixel på sensorn per 2x2 yta. Kort sagt gör det att för att få en bild med lika många pixlar som sensorn har men med full färginformation överallt behövs mjukvara för att trolla fram två tredjedelar av informationen så att det finns tripeln R, G, B överallt. Det är inte så lätt att göra bra.
Många etablerade metoder försöker lösa det genom att anta en stark kromatisk korrelation mellan grönt och rött eller blått. Det är inte ett orimligt antagande i sig, och fungerar ofta. Problemet är att samma antagande kan falla ganska hårt så fort motivet innehåller abrupt kromatisk variation.
När det händer får man inte bara lite oskärpa eller lite brus. Man kan få falsk struktur, märkliga neutraliseringar eller andra fel som beror mer på algoritmens egenheter än på scenen själv.
Metoden som används i FotoV ser alltså till att inte göra något sådant antagande, och begränsar sig till att göra inferenser baserat på meningsfullt jämförbar information och gör så gott man kan trots det. Därav kallar jag den här strategin för 'Commensurability-first demosaicing'.
Ett exempel på effekten av det här går att se i fallet nedan där jag tagit skärmdumpar på en närbild av telefonskärm som blivit framkallad med olika demosaicing-metoder. Det är något av ett mardrömsscenario för alla metoder med tanke på hur plötsligt alla färger varierar så mycket över så korta avstånd. Referensen i det där fallet är en Pixel Shift-version av samma bild, där alltså sensorn fysiskt flyttat på sig mellan fyra exponeringar så att full färginformation finns på en sammanslagen variant.
CFD
Klicka gärna på RGB över Pixel Shift bilden för att se hur den ser ut i helfärg så blir det kanske tydligare vad bilden föreställer, trots att det bara är gråskala på jämförelsebilderna då det är den röda kanalen som är isolerad på dem.
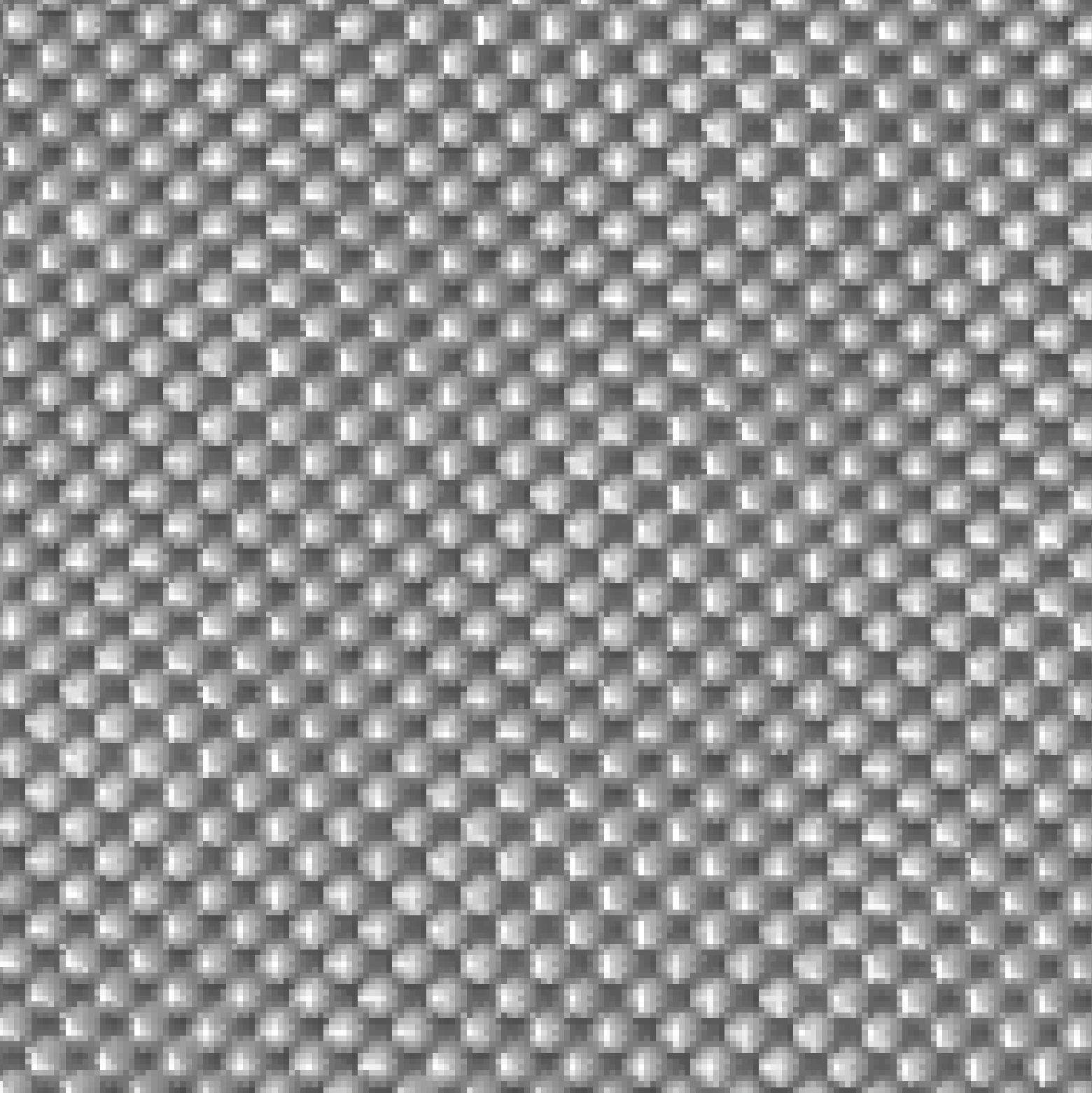
CFD håller ihop den röda latticen bättre än de andra exemplen, även om den inte matchar referensen perfekt.